
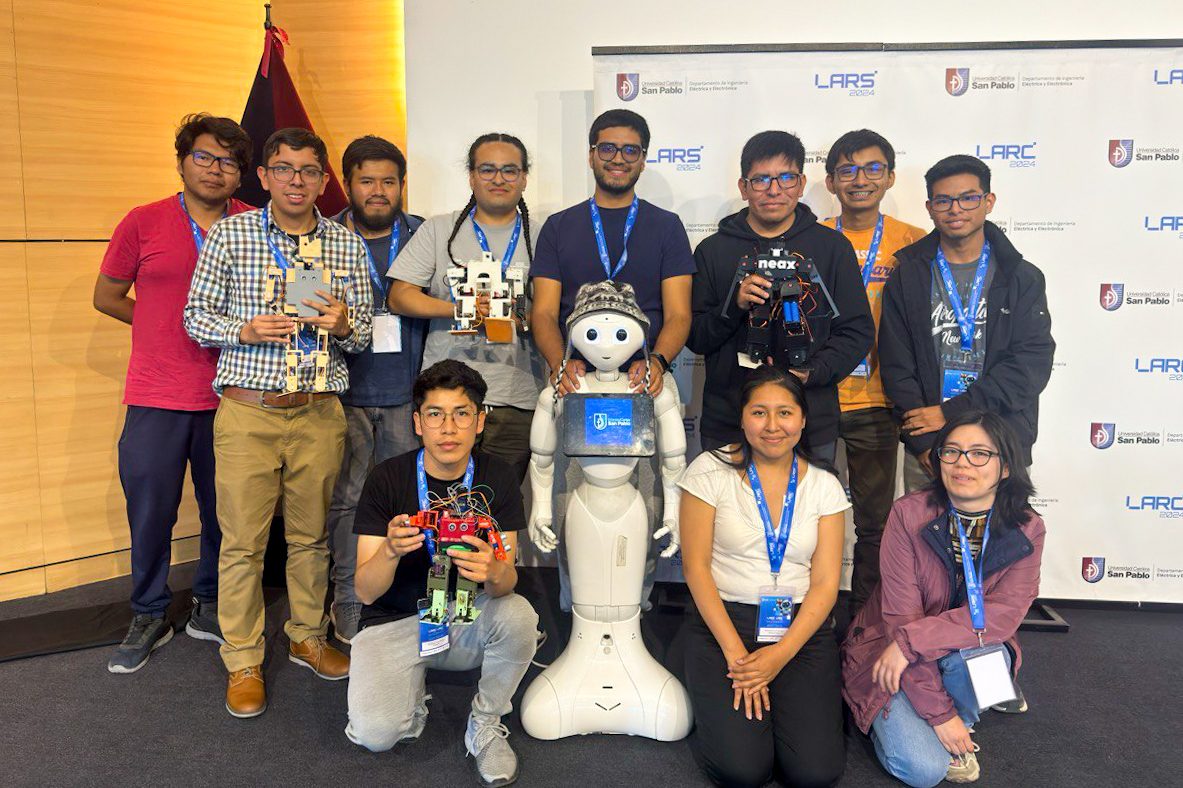
El equipo UTABOT, conformado por Rodrigo Reynaga Solares, José Matamoro Castro, Mauricio Torrez Zenis, Kevin Cruz Cruz y Elizabeth Martínez Huahuasoncco, creadores del robot “JuanBot”, superaron con éxito las pruebas de la competencia de robótica en la categoría “Humanoid”.
UTABOT, el equipo de estudiantes de Ingeniería Civil Eléctrica y Electrónica, y Civil en Computación e Informática, recientemente obtuvo el primer lugar en la categoría “Humanoid” de la Competencia Latinoamericana de Robótica (LARC) 2024 en Arequipa.
El evento se realizó en el marco del Simposio Latinoamericano de Robótica (LARS), el cual fue organizado por la Universidad Católica San Pablo (UCSP) y su Departamento de Ingeniería Eléctrica y Electrónica.
Se trata de Rodrigo Reynaga Solares, José Matamoro Castro, Mauricio Torrez Zenis, Kevin Cruz Cruz y Elizabeth Martínez Huahuasoncco, quienes se unieron para participar en primera instancia en el Concurso de Prototipado del proyecto Ingeniería 2030, donde también participó el equipo ELECTROBOT.
Aquel concurso interno de la Facultad de Ingeniería UTA permitió al equipo UTABOT dar vida a “JuanBot”, con el cual posteriormente viajaron al país vecino para competir en el LARC.
La prueba consistió en lograr que el robot caminara de manera autónoma una pista de cinco metros de largo, reto que también debió superar con obstáculos. Aunque, no se trató de un logro sencillo, pues detrás de este triunfo hubo meses de arduo trabajo por parte del equipo que debe su nombre a la academia de robótica UTABOT del Departamento de Ingeniería Eléctrica y Electrónica.

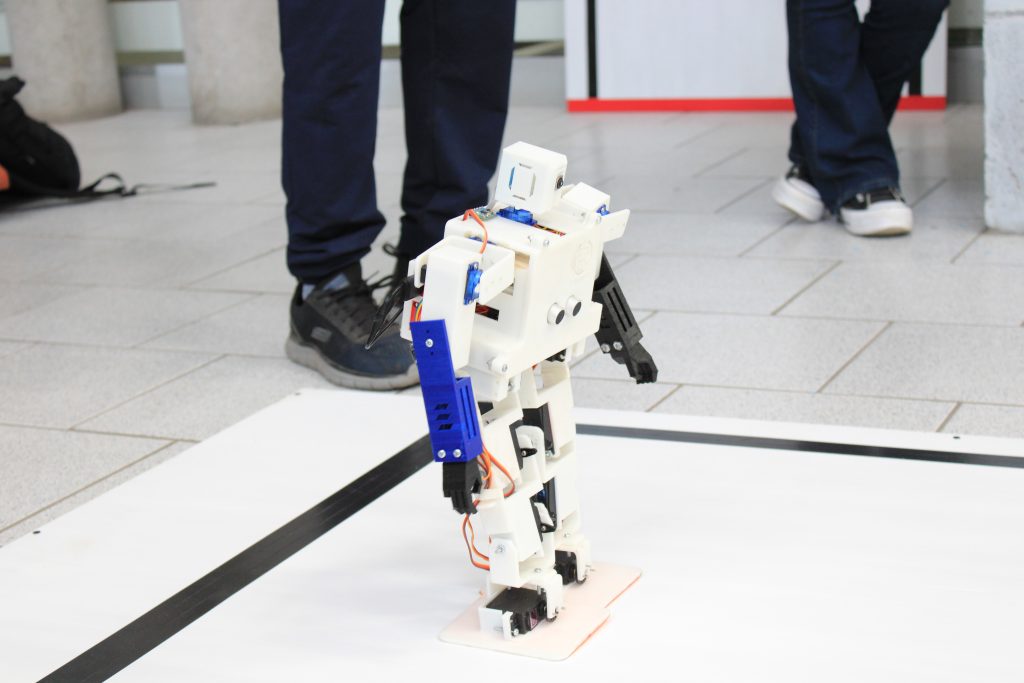
“JuanBot” y su elaboración
La construcción del robot consistió en tres etapas principales: la elaboración de su estructura, la programación para que fuese autónomo y el entrenamiento de la caminata con miras a superar los desafíos del concurso.
“Tomó unos dos meses y medio, más o menos. Básicamente el primer mes fue solamente realizar la estructura, imprimir las piezas en la impresora 3D, hacer el diseño, por prueba y error, y todo eso tomó casi un mes y medio, creo que fue lo que más tiempo tuvo. Y ya luego el siguiente mes ya fue pura programación”, comentó Kevin Cruz.
Al respecto, Rodrigo Reynaga relató que “uno de los primeros desafíos fue cómo empezar a estructurar la forma humanoide. Fue uno de los desafíos más complejos que hemos enfrentado, ya que siempre que buscábamos información de cómo eran los robots humanoides, no era muy asertiva. Unos robots ocupaban cierto tipo de estructura, porque tenían ciertos componentes, otros ocupaban otro tipo, otros controladores y entonces era muy variado”.
“Entonces teníamos muchas cosas que pensar, pero igual mucha de esta información era muy difícil de encontrar, por lo que pensamos cómo hacer nuestro propio diseño de un robot por nosotros mismos”, agregó.
“Al principio estábamos con unos servos que no aguantaban el peso. En un momento tuvimos que dejar fija la rodilla”, comentó José Matamoro.
En cuanto a la programación, Mauricio Torrez, afirmó que fue fundamental realizar una programación para que las piernas fueran estables, con el fin de que ambas avancen de forma pareja y su caminata sea recta.
“Para solventar ese tema lo que hicimos fue, una vez sabiendo que el robot, dada una cierta cantidad de tiempo, se desvía a cierto ángulo en promedio, parar el robot y corregir su orientación, haciendo una secuencia de giro”, explicó Torrez.
La competencia
Elizabeth Martínez relató que si bien no tenían la expectativa al 100% de ganar el primer lugar, no lo veían como un reto imposible, y que fue de gran ayuda haber presenciado competencias similares en Arequipa.
“Hay un campeonato similar que tenía involucrados robots y ahí, más o menos, vi cómo era, cómo se preparaban. No lo vi tan lejano gracias a eso, pero si no hubiera visto esa instancia que me permitió visualizar todo el desempeño que tenían mis compañeros y todo el avance que ellos tenían, hubiera pensado diferente”, comentó Martínez.
En esta misma línea, Reynaga agregó que “cuando empezamos a hacer las pruebas del robot y vi a mi alrededor, veía las otras categorías cómo eran los equipos, que estaban muy preparados. Hubo gente que literalmente estaba ahí participando en este concurso LARC de hace muchos años ya. Entonces, daba un poco de miedo”.
Mauricio Torrez explicó que los equipos en LARC suelen año a año mejorar un mismo proyecto de robótica, “Tenían esa ventaja. Nosotros como no sabíamos tanto fuimos así no másm y ahí vimos igual que ellos recibían harto apoyo; tenían auspiciadores, poleras llenas de logos, como equipo de fútbol.
“Sí, eso fue una sorpresa para mí cuando llegamos allá. Fue intimidante ver eso. Tenían logos de Microsoft, Lego, Python, etcétera”, agregó Martínez.
No obstante, a pesar de lo preparados que se encontraban los equipos rivales de Lima y Arequipa, el apoyo recibido por UTABOT en cuanto a componentes reunidos por el equipo y, en parte, facilitados por el profesor Lorenzo Vásquez y el proyecto Ingeniería 2030, fueron claves al momento de competir.
“Todos los equipos que vimos estaban usando, quizás, mejores servos que nosotros o casi iguales, pero lo que nos diferenciaba era el controlador, que sería la Raspberry Pi 4. Eso fue lo que nos estaba diferenciando mucho de lo que noté. Los demás ocupaban microcontroladores igual de buenos, pero no tan fuertes. El resto de equipos ocupaba mayormente el ESP32 y creo que arduino, si no me equivoco”, recordó Reynaga.
Asimismo, los sensores utilizados fueron clave para el triunfo del equipo UTABOT.
Reynaga explicó que “lo otro que nos diferenció mucho fue el uso de los sensores para corregir el la caminata. Creo que solo dos equipos ocuparon lo que era el EVO, que era para la corrección del ángulo durante la caminata, pero nosotros ocupamos un sensor LIDAR. Eso fue algo que sorprendió a todos ahí, porque era algo muy llamativo, sinceramente. Estaba anclado en lo que es la estructura del robot y fue lo que lo resaltó”.
Al respecto, Torrez agregó que “los que conocen sobre esta área lo ven como un sensor muy futurista”.
Reactivando UTABOT
Una de las motivaciones que tiene el equipo posterior a la competencia consiste en continuar reactivando la academia UTABOT e incentivar a que sea multidisciplinaria, pues se trata de un espacio impulsado principalmente en las carreras de Ingeniería Electrónica.
“UTABOT es una academia que ya existía desde antes. Los chicos, Kevin y Rodrigo, estaban participando antes de la pandemia, pero cuando volvimos ya estaba muy inactiva. Así que, ahí nos pusimos a habilitar espacios y queríamos competir por eso”, comentó Matamoro.
Sobre continuar contribuyendo en la academia, Matamoro agregó que sería un primer paso: “Ya quizás en el futuro se van a ver aún más diversos los equipos”.
“Esa es la idea que tiene UTABOT, expandirse”, concluyó Martínez.



